
北京航空航天大学能源与动力工程学院开发出一种新型的昆虫级别的腿式微型机器人,称为BHMbot,它实现了超快的无缆奔跑速度。BHMbot配备了先进的驱动机制,基于电磁驱动器,解决了携带必要负载后奔跑速度严重下降的问题。该机器人通过特定的奔跑步态,能够实现类似某些哺乳动物的高速跳跃运动模式。
该机器人有两个独立控制的前腿,能够实现多种运动轨迹,例如圆形、矩形、字母形状,并能够跨越障碍物。
BHMbot能够在无缆情况下达到17.5体长每秒(BL/s)的相对运行速度,这是相对于其2厘米的体长而言的一个显著成就。在优化后的原型测试中,BHMbot在无负载情况下的最高速度可达每秒50厘米(33.3 BL/s)。
BHMbot的设计灵感主要来源于自然界中的快速奔跑动物,尤其是那些具有高效跳跃和奔跑能力的哺乳动物和昆虫。研究人员观察到,这些生物通过特定的奔跑步态和跳跃动量实现了高速运动,这种运动模式包括腿部的摆动和地面的冲击,使得身体能够暂时腾空,从而大幅提高运动速度。
- 加利福尼亚螨虫(Paratarsotomus macropalpis):这种螨虫以极高的速度奔跑,最高速度可达192.4体长每秒(BL/s)。它的高速奔跑能力激发了研究人员设计出BHMbot这种能够实现超高速运行的微型机器人。
- 澳大利亚虎甲虫(Cicindela eburneola):这种虎甲虫也具有极高的奔跑速度,最高速度达到171 BL/s。它的运动模式为BHMbot的设计提供了参考,尤其是在如何通过简单的腿部结构实现高效移动方面。
- 蟑螂(Nauphoeta cinerea):常见蟑螂的奔跑速度约为13 BL/s。虽然BHMbot的速度略低于一些特定的昆虫,但它仍然超越了普通蟑螂的运动表现,展示了其在模仿昆虫运动方面的成功。
- 奔跑哺乳动物:BHMbot 的弹跳运动机制受哺乳动物奔跑姿态的启发。哺乳动物在奔跑时,身体会经历一个“弹跳”的过程,即在四肢离地时身体腾空。这种弹跳运动通过四肢的协调摆动和地面接触产生推进力。BHMbot 通过模仿这种弹跳模式,实现了类似于哺乳动物奔跑的高效运动方式。
设计与机制
BHMbot(北航微型机器人)的设计重点在于其独特的驱动机制和结构布局,能够在携带负载的情况下实现高速无缆运行。以下是该机器人的设计与机制的详细介绍: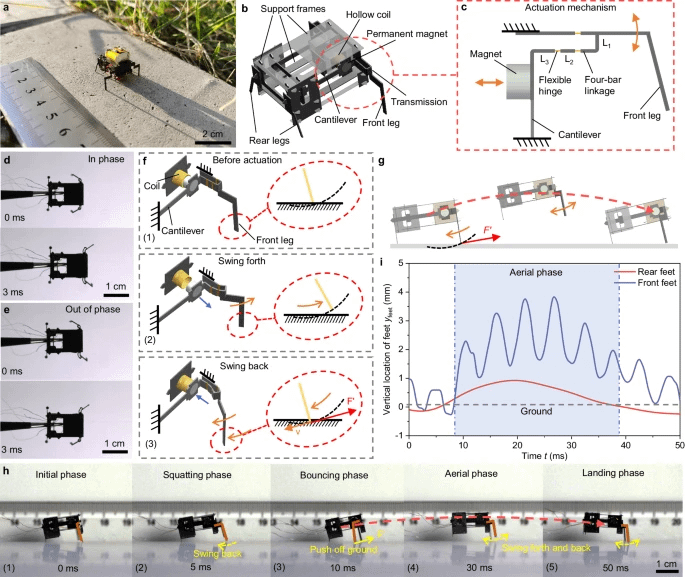
- 驱动机制:
- 核心组件:BHMbot 的驱动系统由电磁驱动器、四杆联动机构和前腿组成。每个电磁驱动器包括一个悬臂、一个永久磁铁和一个空心线圈。当线圈通电后,会在磁铁上产生交变的电磁力,使悬臂产生振动。
- 弹跳运动的实现:BHMbot采用了一种通过前腿与地面的周期性冲击来实现的弹跳运动。前腿与地面产生一个向下的冲击力,从而使机器人获得一个向上的反作用力。这种反作用力使机器人能够在地面上弹跳,从而实现高速的前进运动。这种机制模仿了哺乳动物的奔跑步态,使得机器人能够在无缆状态下保持高速度。
- 电磁驱动器:机器人配备了两个电磁驱动器,每个驱动器由一个悬臂、一个永久磁铁和一个空心线圈组成。驱动器输出振动运动,通过四杆联动机构将这种振动转化为前腿的摆动运动。该驱动器具有较高的功率密度(超过200W/kg),可以在较低的工作电压下(小于2V)操作,避免了设计高压升压模块的需求。
- 驱动过程:当交变电压施加到线圈上时,线圈中的电流会在磁铁上产生交变的吸引力和排斥力。这使得磁铁在悬臂上前后振动,而这种振动通过四杆联动机构被转化为前腿的摆动。前腿的摆动会推动机器人前进或转弯。
- 结构设计:
- 前腿与后腿的设计:为了产生向上的弹跳力,BHMbot的前腿设计得比后腿长,形成了一个向上的倾斜角度(θ0)。这种设计使得在摆动过程中,前腿能够有效推动机器人向上跳跃,从而实现高速前进。
- 运动模式:BHMbot 的运行分为多个阶段,包括前腿摆动、身体弹跳、空中飞行和着陆。每个阶段的协调运动使机器人能够实现连续的前进。通过控制电磁驱动器的工作频率和摆动幅度,BHMbot 可以调整其前进速度和转向角度。
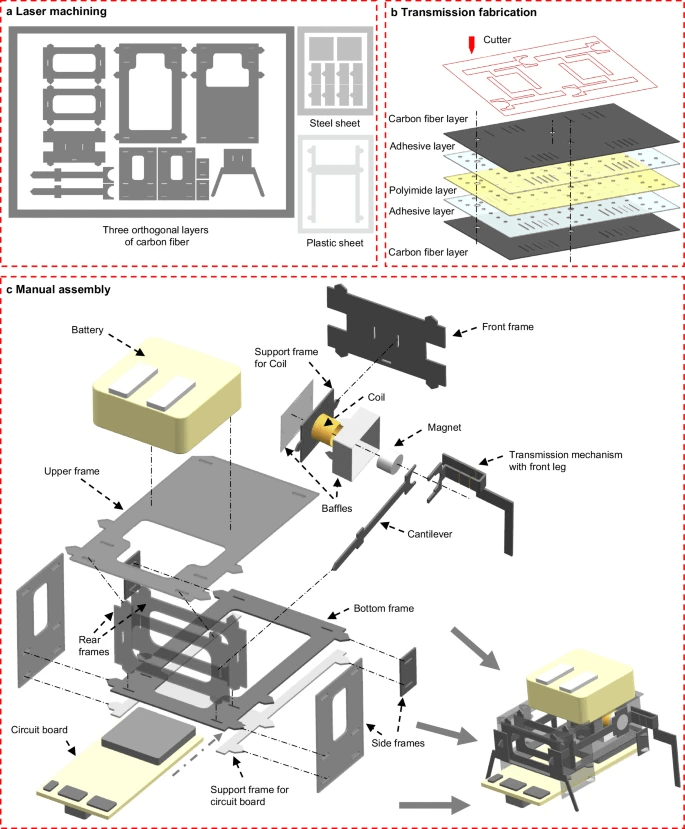
- 材料与组件:机器人由多种轻质材料制成,包括碳纤维支架、微型电路板和锂电池。其结构设计非常紧凑,以减轻重量并提高运行效率。
- 运动分析:
- 运行步态:BHMbot的运行步态通过高频摆动前腿来实现。这种步态类似于哺乳动物的奔跑方式,机器人在运行过程中会经历多个连续的弹跳周期。每个弹跳周期包括前腿摆动、弹跳、空中飞行和着陆四个主要阶段。
- 运行速度与跳跃频率的关系:BHMbot的运行速度取决于弹跳长度和弹跳频率的组合。优化后的设计使得即使在携带负载的情况下,机器人也能够维持较高的跳跃频率,从而实现较高的速度。
Support authors and subscribe to content
This is premium stuff. Subscribe to read the entire article.
Login if you have purchased












{kind=link}