
Meta FAIR(基础人工智能研究团队)公开发布了多项新研究成果,旨在推动机器人技术的发展,以实现高级机器智能(AMI)。此次发布的研究成果集中在触觉感知、机器人灵活性和人机交互上,强调了机器人与物理世界的互动能力,这对完成日常任务至关重要。
- Meta Sparsh:这是首个通用触觉表示,能够支持多种传感器和任务,旨在帮助AI系统理解并互动无法通过视觉获取的信息。
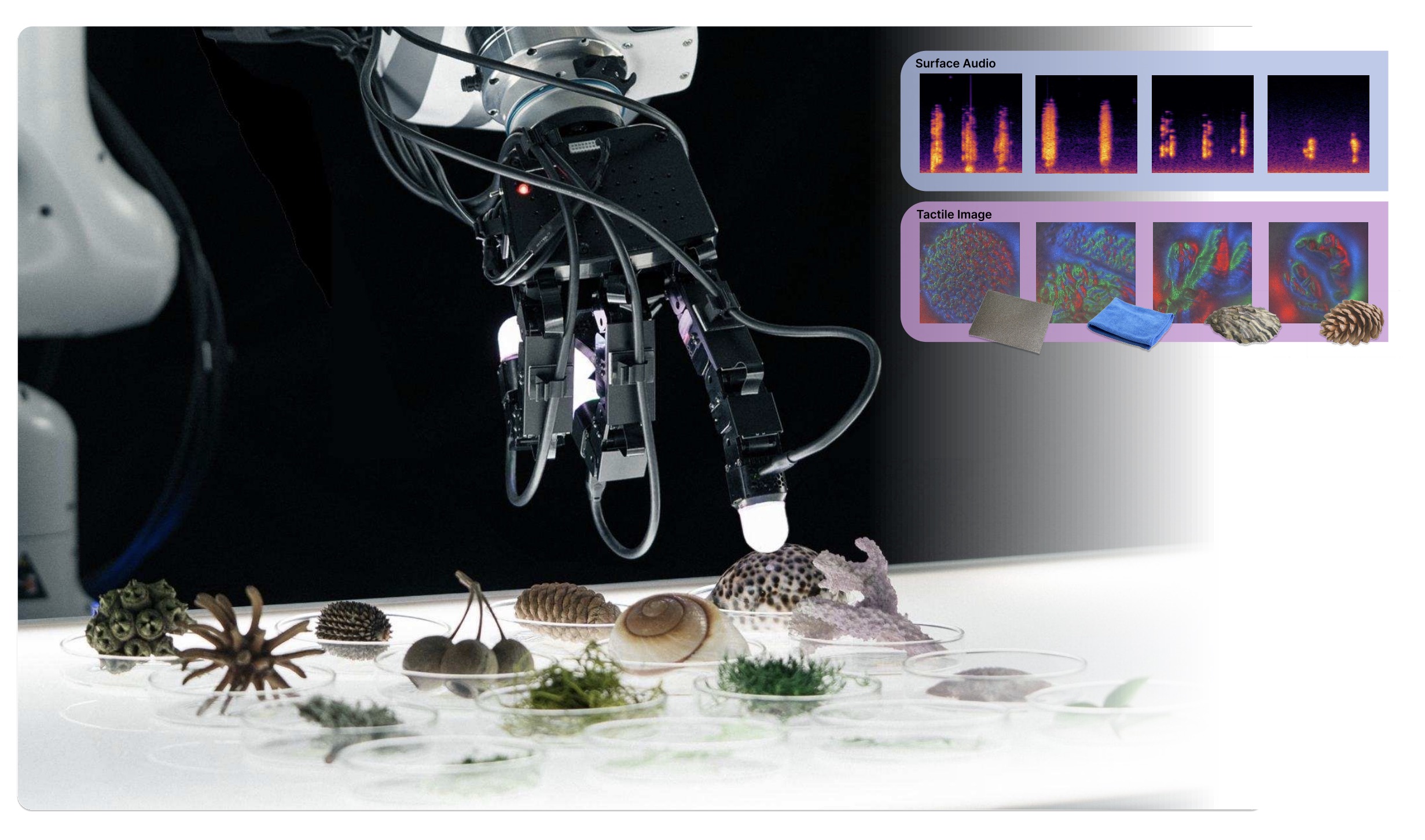
- Meta Digit 360:一种人造指尖传感器,具有人类级别的多模态感知能力,能够检测到极小的触觉变化(如1毫牛顿的力量),为触觉感知研究提供了丰富的数据。
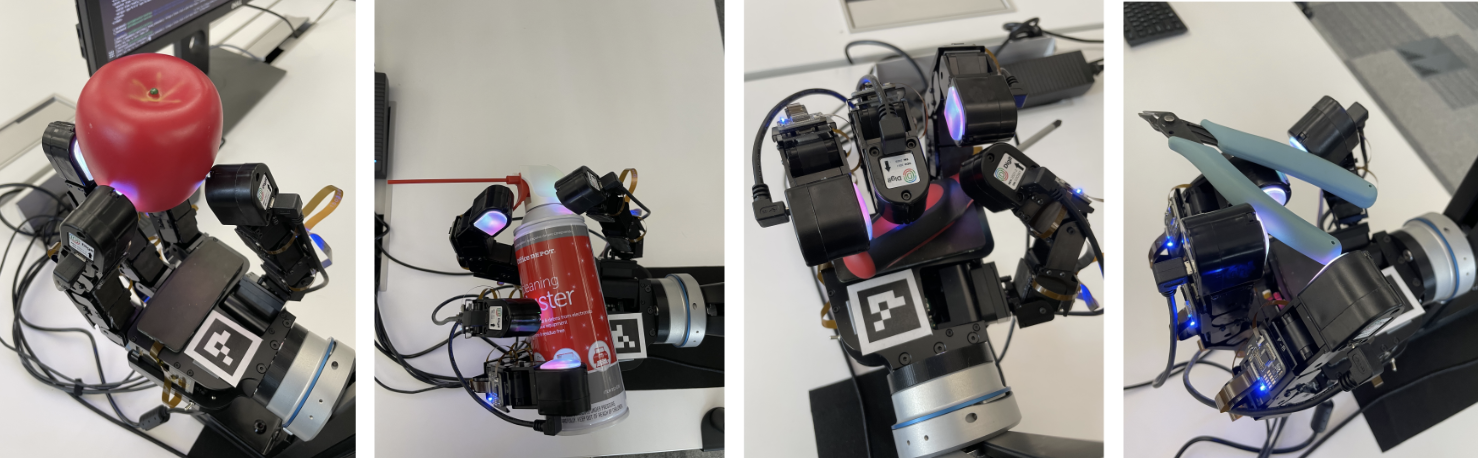
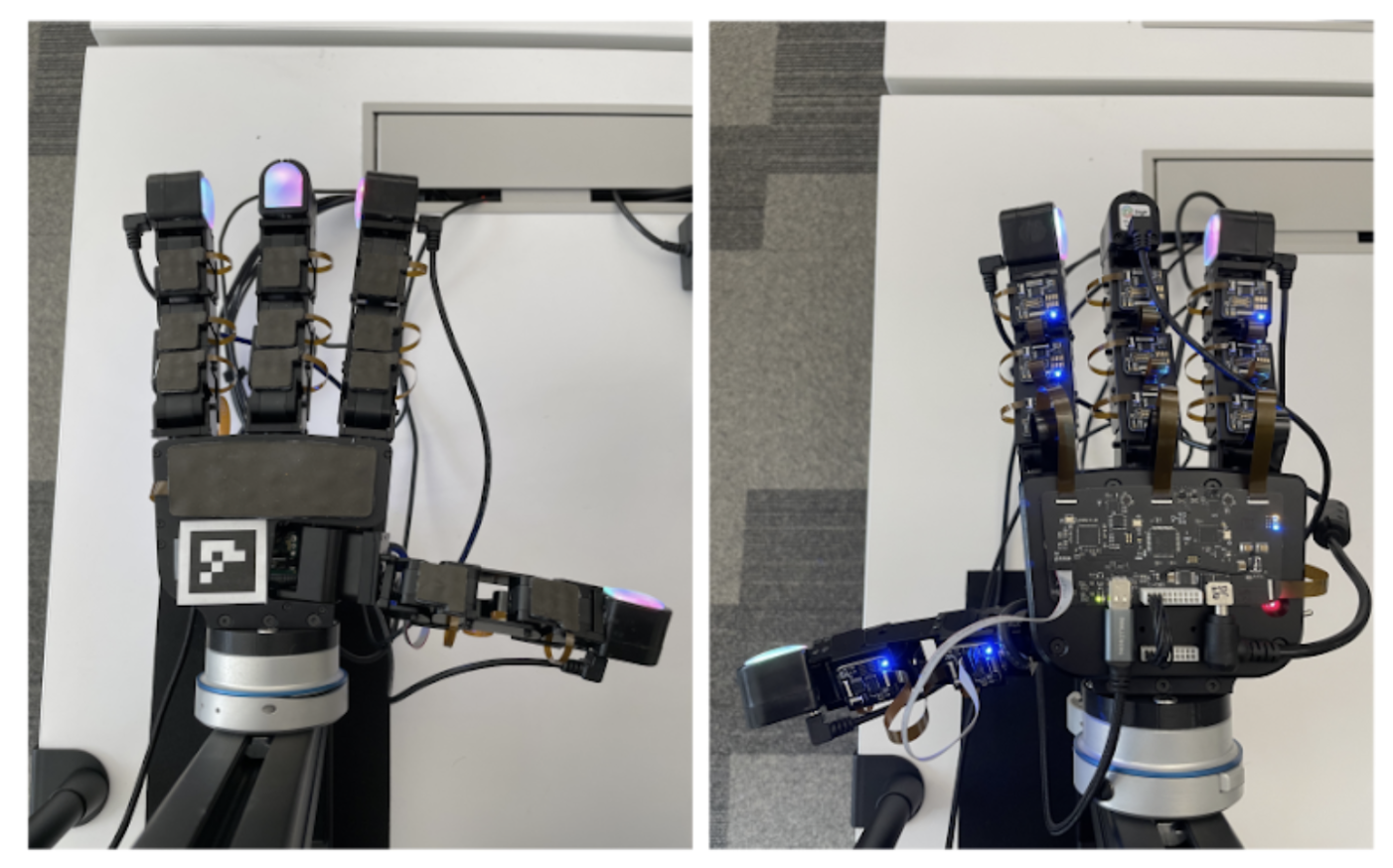
- Meta Digit Plexus:这是一个标准化的平台,整合了多种触觉传感器,支持在同一个机器人手上进行数据采集和控制。
Meta Sparsh
- 随着机器人技术的发展,触觉感知(即机器人感知物体触感的能力)变得越来越重要,尤其是在需要与物体互动的场合,例如抓取、搬运和操作。
- 传统的触觉感知依赖于传感器,然而这些传感器通常需要大量人工标记的数据进行训练。为了解决这个问题,研究者们提出了自监督学习方法,能够从未标记的数据中学习和提取特征。
Meta Sparsh 是一种通用触觉表示技术,旨在提升机器人的触觉感知能力。它帮助机器人通过视觉来理解触觉。想象一下,当你用手触摸一个物体时,你不仅能感受到物体的形状和重量,还能感知到滑动的感觉。这项研究的目标就是让机器人具备这样的能力。
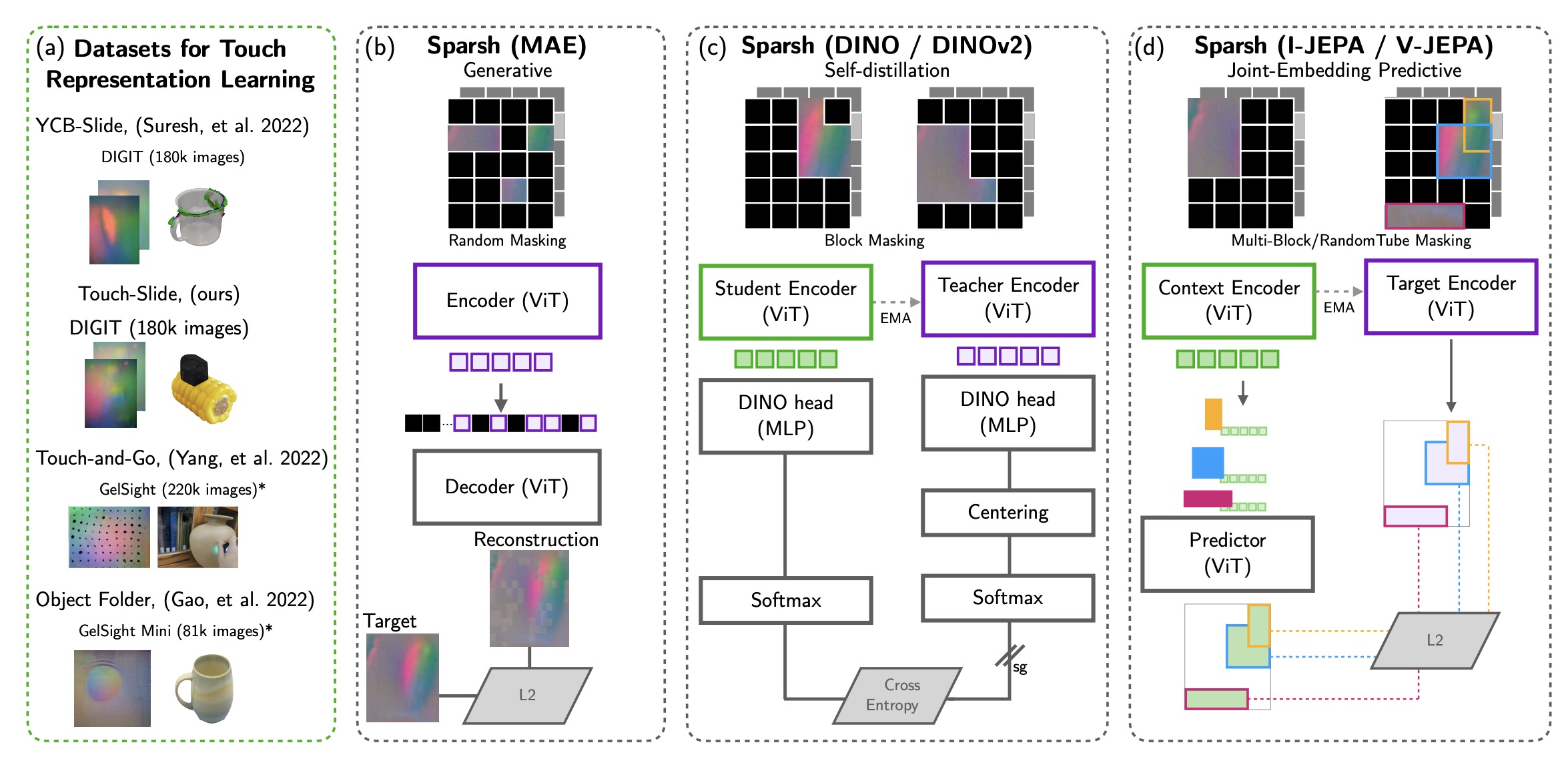
为了训练这个系统,研究人员使用了自监督学习。Meta Sparsh利用自监督学习在一个包含460,000个触觉样本的数据集上进行预训练。这种学习方法允许模型在没有明确标签的情况下,从大量数据中自动学习,从而提高了学习的效率和灵活性。
这意味着机器人能够从大量没有标记的信息中学习,而不需要人类逐个标记数据。这种方式让训练过程更加高效。
主要特性
- 通用触觉表示:
- Meta Sparsh旨在为机器人提供一个统一的框架,使其能够理解和处理来自不同类型触觉传感器的数据。这种表示方式可以支持多种传感器的整合,包括压力传感器、振动传感器等。
- Sparsh是一种通用的触觉表示方法,可以广泛应用于各种基于视觉的触觉感知任务,适用于不同类型的机器人和自动化系统。
- 多任务支持:
- 该技术不仅能够适用于单一任务,还能在多种任务中使用,增强机器人在复杂环境中的适应能力。这使得机器人能够在不同情境下更好地理解触觉信息。
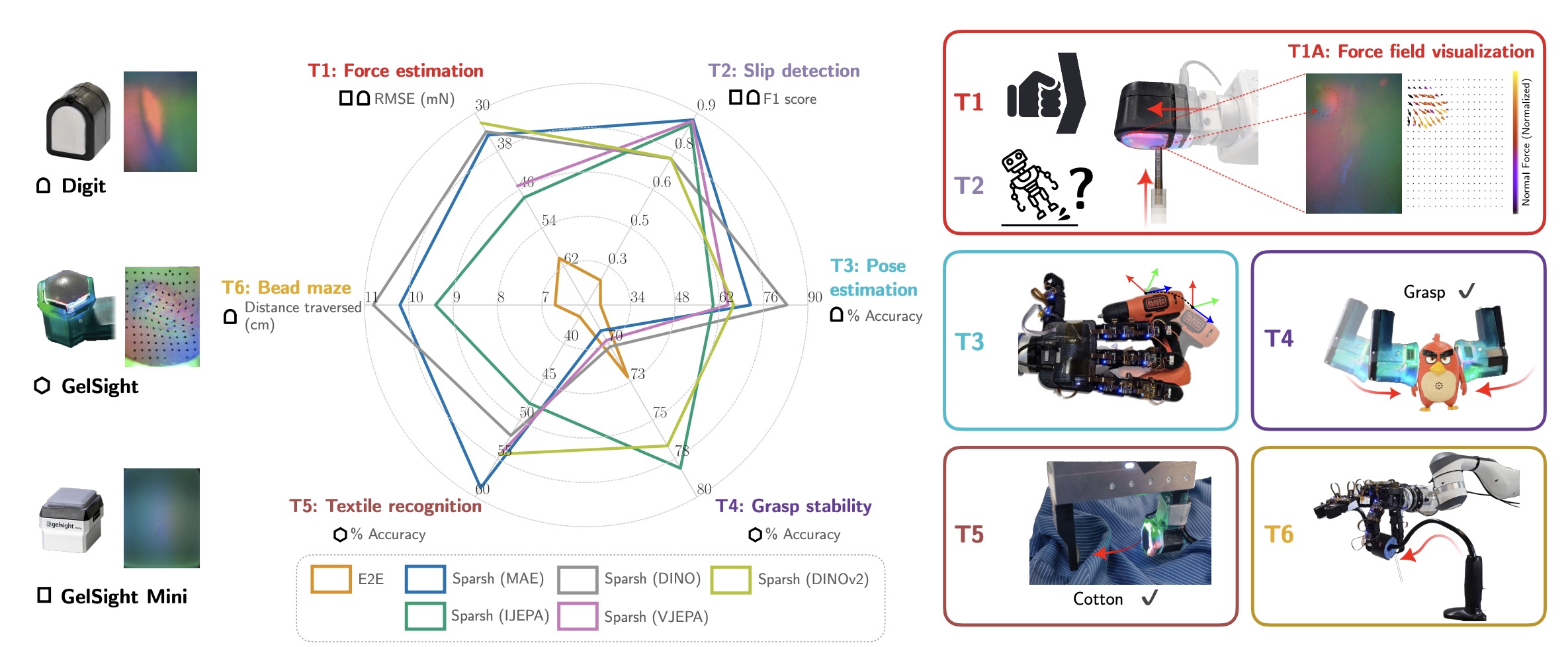
- Sparsh在六个不同的触觉相关任务中表现出色,这些任务包括力量估计、滑动检测、抓握稳定性等。该方法能够适应多种应用场景,提高了机器人的多功能性。
- 增强互动能力:
- 通过提升触觉感知,Meta Sparsh使机器人能够更有效地与物理世界互动。例如,机器人可以更准确地感知物体的形状、重量和材料,从而执行更加精细的操作。
- 实验结果显示,Sparsh在力量估计和抓握稳定性任务中具有较高的准确性,能够有效减少预测错误,提高操作的安全性和可靠性。
应用前景
- 机器人抓取与操作:
- Sparsh 可以用于提高机器人在复杂环境中抓取和操作物体的能力,使其能够更好地执行任务,如搬运、组装和分类等。尤其是在制造和仓储领域,可以提高自动化设备在组装和检验过程中的灵活性和精确度。机器人的高效抓取和处理能力将显著提升工作效率。
- 人机交互:
- 在人机交互场景中,Sparsh 可用于增强机器人的触觉反馈能力,使其能够更自然地与人类进行互动。例如,在社交机器人或护理机器人中,触觉感知能力能够改善与用户的互动质量,提供更人性化的服务。
- 虚拟现实与增强现实:
- Sparsh 可用于虚拟现实(VR)和增强现实(AR)技术中,提升用户的沉浸感。通过结合视觉和触觉信息,用户在虚拟环境中的体验将更加真实,能够更好地模拟与虚拟物体的交互。
- 医疗领域:
- 在医疗机器人中,Sparsh 可以用于改善手术机器人对触觉的感知,帮助外科医生更准确地进行操作,提高手术的成功率。此外,在康复治疗中,机器人可以通过触觉反馈来帮助患者恢复运动能力。
- 智能家居:
- Sparsh 可以集成到智能家居设备中,提高这些设备的触觉感知能力,使其能够更好地理解用户的需求。例如,智能家居机器人可以根据触觉反馈来执行家庭清洁或安全监控任务。
- 教育和培训:
- 在教育和培训领域,Sparsh 可用于开发触觉反馈系统,帮助学生更好地理解物理概念或技能训练。例如,通过触觉反馈,学生可以在实验中更直观地理解力学原理。
Download the models and dataset 下载模型和数据集
Meta Digit 360
- 触觉是人类与环境交互的重要感知方式,能够提供丰富的信息关于物体特性及其与环境的交互。
- 当前的触觉感知系统大多缺乏多模态的数字触觉感知能力,无法充分模拟人类的触觉体验。
Meta Digit 360 是一种高级触觉传感器,被称为“人工多模态指尖”,通过这个设备模拟人类的触觉体验。旨在提升机器人的触觉感知能力。
- Digit 360 采用半球形设计,内部集成了多种传感器,能够感知触觉强度、物体形状和表面特性等信息。
- 设备集成了多种类型的传感器,包括压力传感器、温度传感器和位移传感器。这些传感器能够实时捕捉物体的触觉信息,并将其转化为数字信号。
- 通过这些传感器的组合,设备能够捕捉到更丰富的触觉信息。
- 它不仅能够感知触觉强度,还能识别物体的形状、表面特性和材料类型。例如,它可以区分不同质地的物体,帮助机器人判断该如何操作。

主要特性
- 人类水平的多模态感知:
- 采用半球形结构,提供更大的接触表面,使设备能够在与物体接触时覆盖更广泛的区域,从而提高触觉感知的精度和灵敏度。
- Meta Digit 360具有人类级别的触觉感知能力,能够捕捉和识别细微的触觉变化,如1毫牛顿的力量。这使得它可以精确感知物体的表面特征、形状、重量和材料。
- 多种传感器集成:
- 该传感器可以整合多种类型的触觉传感器,提供更全面的数据采集能力。它的设计允许在同一设备上使用不同的传感技术,以支持多样化的任务需求。
- 集成了高精度的传感器,能够实时捕捉物体的触觉特性,如形状、纹理和材料类型。这使得设备能够精确识别不同物体并作出相应反应。
- 增强的灵活性和适应性:
- Meta Digit 360的设计使得机器人在与物体交互时能够更具灵活性。例如,在抓取、移动和操控物体时,它可以根据触觉反馈实时调整动作。
- 设备能够提供真实的触觉反馈,使机器人在与人类互动或处理物体时,能够更自然地进行操作,提高人机交互的体验。
- 多模态感知:
- 设备能够同时感知多种类型的触觉信息,包括压力、温度和位移等,模拟人类手指的多样触觉体验。
- 该设备在不同的环境条件下依然保持高性能,能够在复杂和动态的环境中有效工作,适应各种操作场景。
- 实时数据处理:
- 设备具备强大的实时数据处理能力,能够迅速将传感器捕获的信息转化为有用的数据,支持快速的反馈和决策。
- 可扩展性:
- 该设备的设计允许未来添加更多传感器或功能模块,使其能够不断适应新的应用需求和技术进步。
- 设备可以与各种机器人和自动化系统兼容,便于集成到现有技术框架中,提升整体系统的功能性。
 实验与评估结果
实验与评估结果
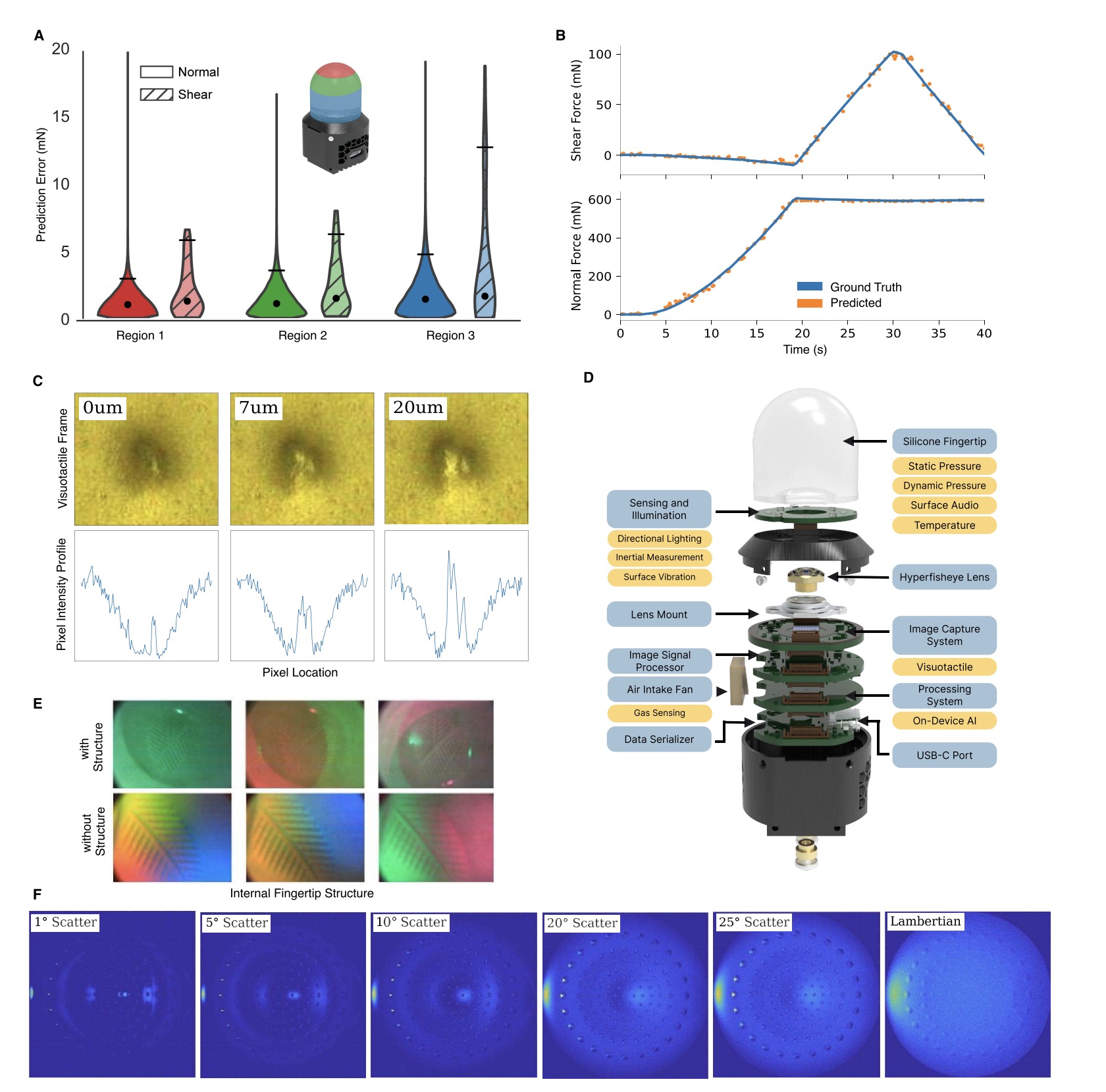
- 空间分辨率:Digit 360 能够分辨最小尺寸约为 7 微米的特征,显著优于传统触觉传感器。通过使用微型压头进行实验,验证了其对微小物体的高灵敏度。
- 力的敏感度:对正常和剪切力的测量显示,Digit 360 在检测正常力时的中位误差为 1.01 毫牛(mN),而剪切力的中位误差为 1.27 毫牛(mN)。这些数据表明,该设备在触觉反馈方面具有优异的性能。
- 多模态感知能力:可以捕捉多种触觉信号,包括声音、温度变化、振动和气体成分。实验表明,该设备在识别不同材料和表面纹理时表现出色,能够感知高达 10 kHz 的振动频率。
- 触觉反馈与反射弧:该设备模拟人类的反射弧,实现快速的触觉处理。通过在设备内部集成AI神经网络加速器,Digit 360 实现了比传统方法更低的延迟(约 1.2 毫秒),使机器人能够快速反应触觉信号。
- 实验环境与评估:在不同的实验环境下,Digit 360 在识别物体的状态(如液体的量、表面滑腻度等)方面表现良好。通过对不同对象的接触实验,研究者能够有效地监测到温度变化和气体成分的变化。
- 精确的物体识别能力:实验结果显示,Digit 360 能够通过触觉信息准确识别物体的特性,例如硬度和表面结构。这种能力对于在动态环境中进行复杂操作至关重要。
- 数据处理能力:设备内部的AI处理能力使其能够实时分析触觉数据,减少了对外部计算资源的依赖。这种局部处理能力提高了设备的反应速度和效率。
 应用前景
应用前景
- 机器人工业和制造:
- 精密装配和处理:在制造业中,机器人通过人工多模态指尖设备能够实现精密的物品抓取和处理。它们能够感知细微的表面差异和材料特性,从而优化组装、检查和分类等流程,尤其适用于高精度制造任务。
- 医疗机器人:
- 外科手术中的触觉反馈:人工多模态指尖能够增强手术机器人的触觉反馈,使外科医生在进行复杂操作时能够准确判断组织的硬度和温度差异,提升手术的安全性和效果。
- 康复治疗:触觉设备可用于辅助康复训练,通过提供触觉反馈帮助患者恢复手部功能和精细运动能力。
- 虚拟现实(VR)和增强现实(AR):
- 提升沉浸式体验:在VR和AR应用中,触觉反馈能够使用户真实感受到虚拟物体的表面、重量和温度。这种多模态触觉体验增强了沉浸感,可用于培训模拟、教育以及娱乐领域。
- 智能家居与个人助理:
- 人机交互:通过集成触觉反馈,家用机器人和智能设备能够更敏锐地感知环境和用户的需求。例如,智能清洁机器人可以根据表面类型调整清洁方式,智能家居系统可以感知门窗的开关状态或温度变化,更好地保障安全。
- 电子商务和物流:
- 产品质检和分类:触觉感知设备能够在产品分类和包装过程中提供细微的质量控制。例如,机器人可以根据触觉特性区分脆弱、粗糙或湿润的物品,以便在运输过程中更好地保护它们。
- 农业机器人:
- 作物采摘和筛选:在农业中,触觉设备帮助机器人识别和区分不同成熟度、大小或硬度的作物。机器人能够依据触觉信息选择最佳的收割时机和方法,以最大限度地减少作物损伤。
- 假肢和辅助设备:
- 智能假肢感知:人工多模态指尖技术可用于假肢,使得用户能够感知接触物体的硬度和温度等特性,从而实现自然的抓握和操作。这对提升假肢的实用性和用户体验具有深远影响。
Download the code and design
下载代码和设计
Digit Plexus
Digit Plexus 是一个机器人硬件平台,旨在为将触觉传感器集成到任何机器人手上提供标准化的硬件软件解决方案,将各种传感器和末端执行器集成到一个统一的系统中。
Digit Plexus 支持在任何机器人手上集成触觉传感器,如 Digit、Digit 360 和 ReSkin。其设计允许通过 USB 接口将数据传输到主机计算机,从而实现无缝的数据收集和控制。
主要特性
- 标准化平台:
- Digit Plexus 提供一个标准架构,使得各种触觉传感器(例如 Digit 和 ReSkin)可以轻松集成到任何机器人手上。这种标准化意味着用户可以在不同的机器人上使用相同的硬件和软件系统,从而提高了灵活性。
- 多种接口:
- 该平台支持多种通信方式,包括 CAN、USB 和 I2C。这意味着机器人可以通过不同的方式接收指令和发送数据,使其适用于多种应用场景。
- 模块化设计:
- 用户可以根据自己的需求定制传感器配置。Digit Plexus 允许将不同的传感器模块连接到机器人手的不同部分,比如手指和手掌,从而灵活调整机器人的感知能力。
- 易于使用的控制界面:
- Digit Plexus 提供了一个基于 Python 的控制接口,用户可以通过简单的编程命令来控制机器人手。此外,还支持 ROS2(机器人操作系统的最新版本)的集成,使得开发者可以更方便地实现复杂的功能。
- 设计资源:
- 项目提供了基础和高级的设计文件,包括 3D 打印或模具设计文件,便于用户根据自己的需求进行制造。用户还可以使用提供的电子设计自动化(ECAD)模板创建自定义的传感器配置。
- 触觉感知的应用潜力:
- 该平台能够连接多个触觉传感器,实现高效的数据收集和分析,为机器人的精细操作提供更丰富的信息。这使得机器人能够更好地感知周围环境,提高与物体互动的能力。
GitHub:https://github.com/facebookresearch/digit-plexus
PARTNR基准测试
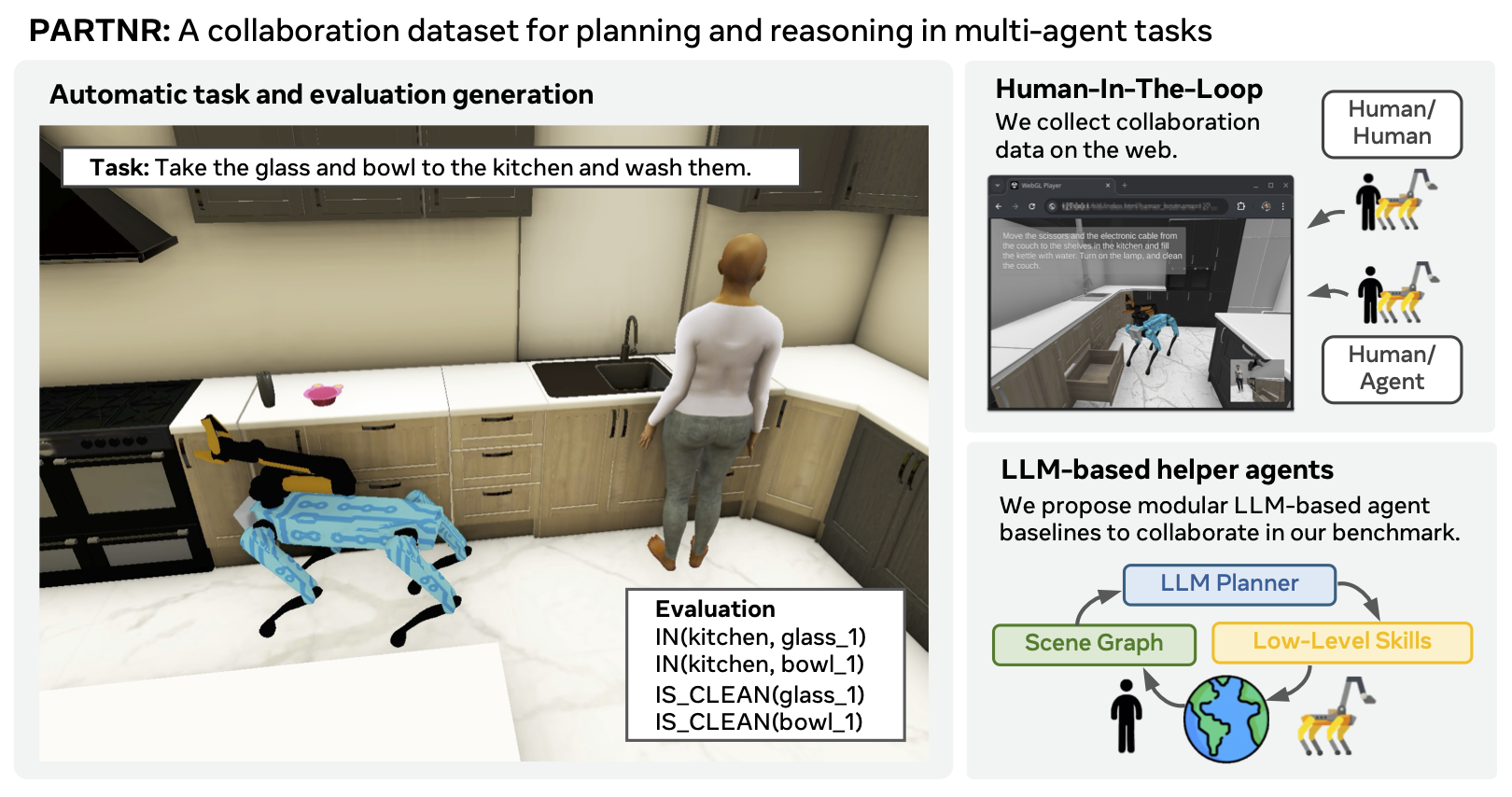
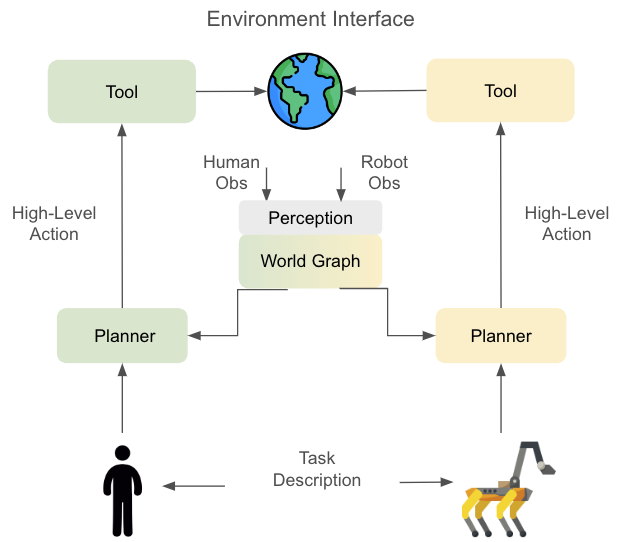
PARTNR(Planning And Reasoning Tasks in humaN-Robot collaboration)是一个专门为研究人类与机器人之间的协作而设计的基准,旨在提高在家庭活动中的人机协调能力。
随着智能机器人技术的发展,如何有效地让机器人与人类协同工作成为了一个重要课题。PARTNR的目标是通过模拟日常家庭活动,来提高人机之间的协调与合作能力。
该基准涵盖了日常任务的多个特性,包括空间、时间和异构智能体能力约束。
 主要特性
主要特性
- 任务特点:
- 多样化的家庭活动:PARTNR中设计的任务模拟了家庭生活中的多种场景,比如做饭、清洁、购物等。这些任务涉及多个机器人和人类之间的协作,要求机器人不仅要完成自己的任务,还要有效地与人类互动。
- 复杂的环境约束:任务设计考虑了多种现实生活中的约束条件,如空间限制、时间限制以及不同类型的智能体(人类与机器人)的能力差异。这些因素影响了任务的执行方式和效率。
- 任务生成流程:
- 半自动化生成:PARTNR采用了一种半自动化的任务生成流程,使用大型语言模型(LLMs)来生成任务。这意味着,研究人员可以通过自然语言描述来创建任务,而不需要手动编写每一个任务细节。
- 模拟与验证:每个生成的任务都要经过仿真环节,确保其在真实环境中是可行的。这种验证过程帮助识别潜在的问题,确保机器人能够在实际操作中成功执行任务。
- 数据集规模与内容:
- PARTNR是迄今为止最大的此类基准,包含了大量的任务样本,研究人员可以使用这些样本进行实验和分析。数据集的规模为机器人研究提供了丰富的参考资料,促进了人机协作领域的深入研究。
- 该基准测试包含超过100,000个自然语言任务,覆盖了多种人机交互场景。这些任务设计旨在评估机器人的理解能力、响应能力和协作能力。
- 应用潜力:
- 推动机器人技术发展:PARTNR的研究结果可以帮助开发更智能的机器人,使其能够更自然地与人类合作。通过对日常任务的分析,研究人员能够改进机器人的决策能力和适应能力。
- 现实世界的应用:随着家庭机器人和自动化设备的普及,PARTNR为未来的应用场景提供了重要的基础,如智能家居、助老助残、家庭护理等领域。












{kind=link}